IMU Pen
(WORK IN PROGRESS)
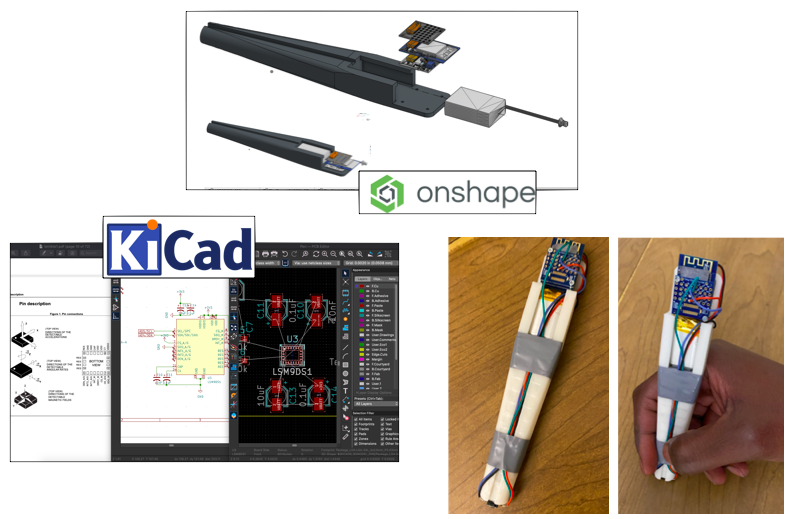
Hardware
I developed a prototype IMU pen. This was a submodule - it was part of the sonic screwdriver project. The objective was to create an electronic pend that could be used on any surface, and the writing translated into alphabets through an online socket. The prototype below was made to collect data.
Data
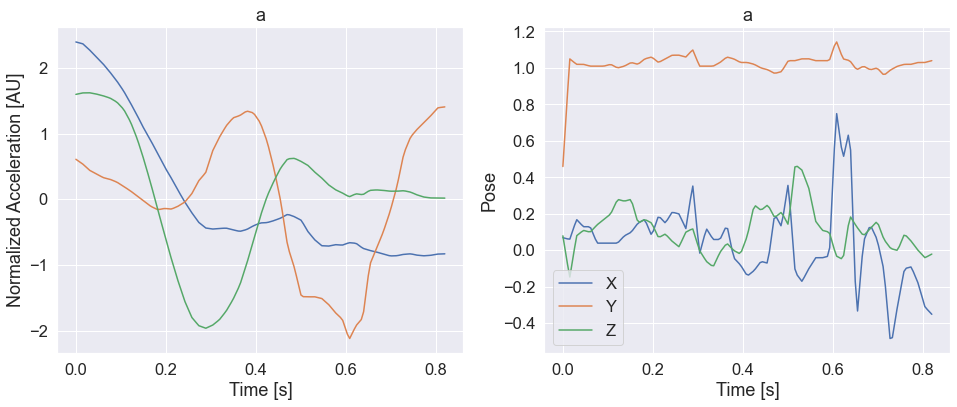
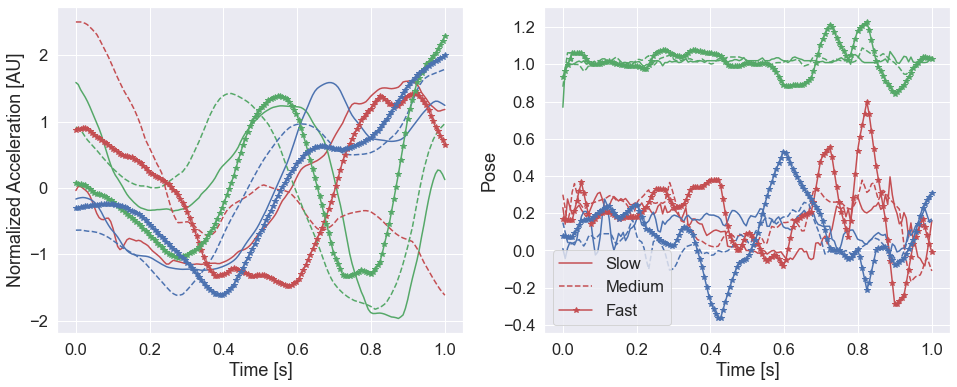
The pen collects motion data from the 9-axis module (accelerometer, gyroscope, magnetometer), and uploads them. The data can then be downloaded and used to train a machine learning model to determine the letter being written from the motion data. The motion data for the letter "a" is shown:
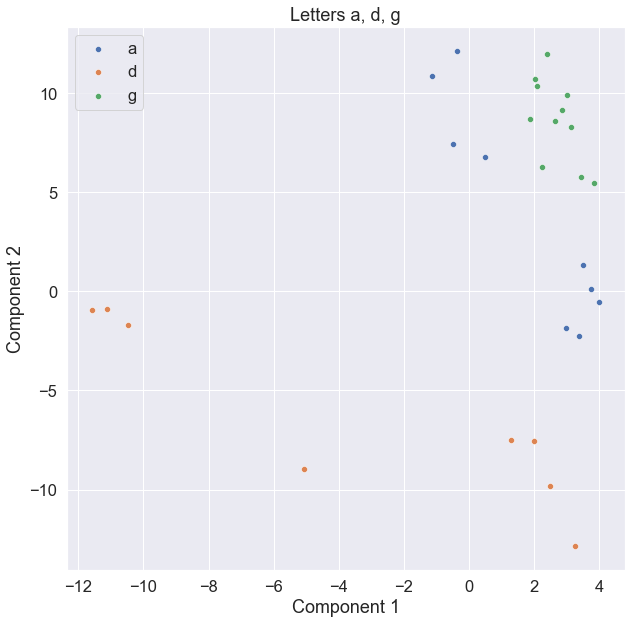
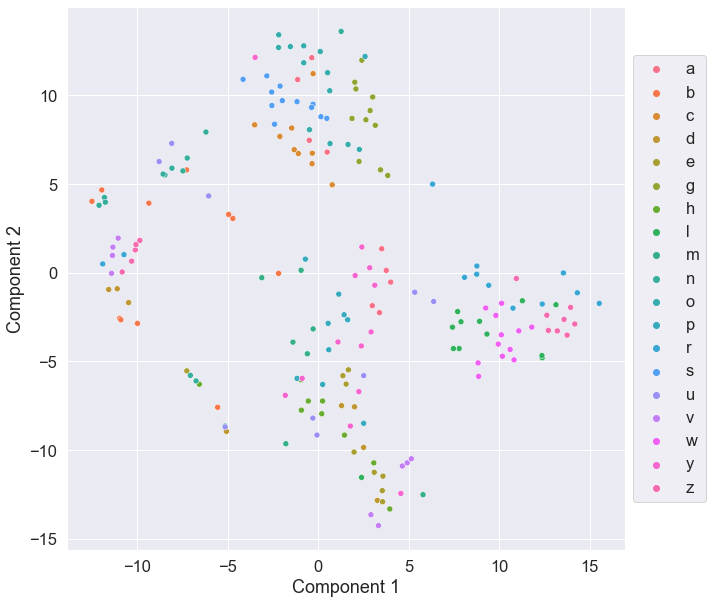
Unsupervised Learning
t-stochastic neigheborhood embeddings (tSNE) was used to learn latent structures in the data space of all recorded motion. Three letters that are similar (a, d, and g) are shown below. In the plots, show that they are similar (grouped nearby), but distinct enough that they are clustered seperately.